Deep Local Feature Matching Image Anomaly Detection with Patch Adaptive Average Pooling Technique

Detecting Anomalies in Textured Images Using Modified Transformer Masked Autoencoder

Anomaly Detection and Localization for Images of Running Paper Web in Paper Manufacturing

Visual Anomaly Detection and Localization with a Patch-Wise Transformer and Convolutional Model

TPSAD: Learning to Detect and Localize Anomalies With Thin Plate Spline Transformation

Unsupervised Detection of Anomalous Sound for Machine Monitoring Under Domain Shifted Condition Based on GANs and Autoencoders

ChatGPT or A Silent Everywhere Helper: A Survey of Large Language Models

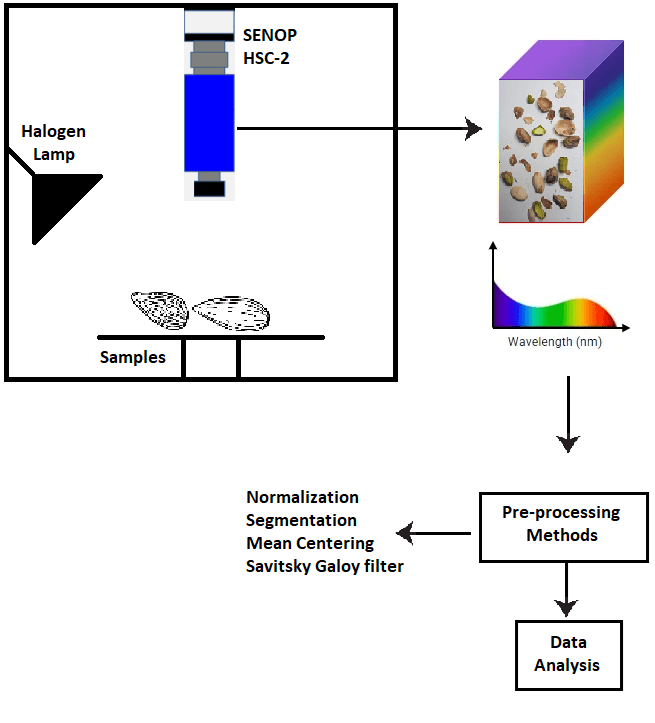
HyperNut: Hyper Spectral Dataset of Nuts for Unsupervised Defect Detection and Segmentation
ScrewCount: A Dataset and Benchmark for Exemplar Efficiency and Text-Guided Few-Shot Object Counting

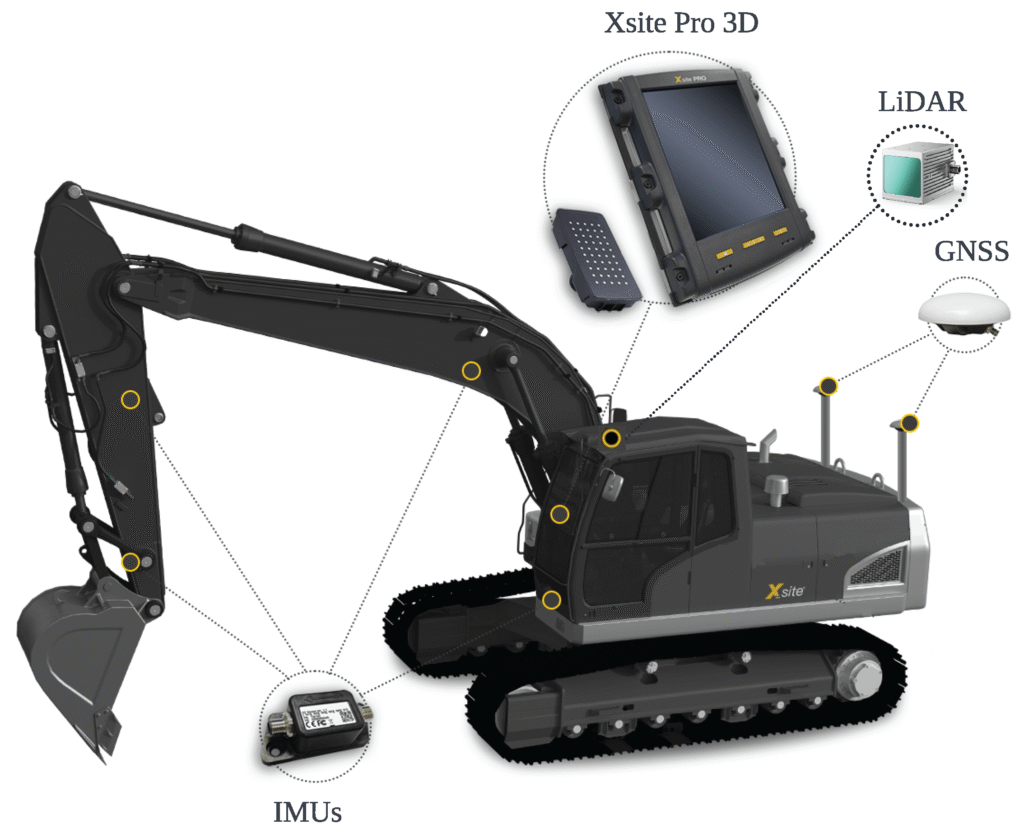
Automatic Estimation of Excavator’s Actual Productivity in Trenching and Grading Operations Using Building Information Modeling (BIM)
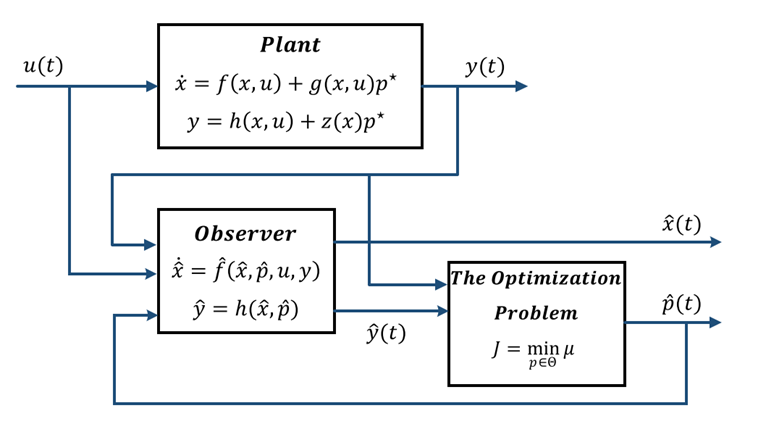
Parameter and State Estimation of Managed Pressure Drilling System Using the Optimization-Based Supervisory Framework
Reservoir Characterization in Under-balanced Drilling with Noninear Moving Horizon Estimation with Manual and Automatic Control Conditions
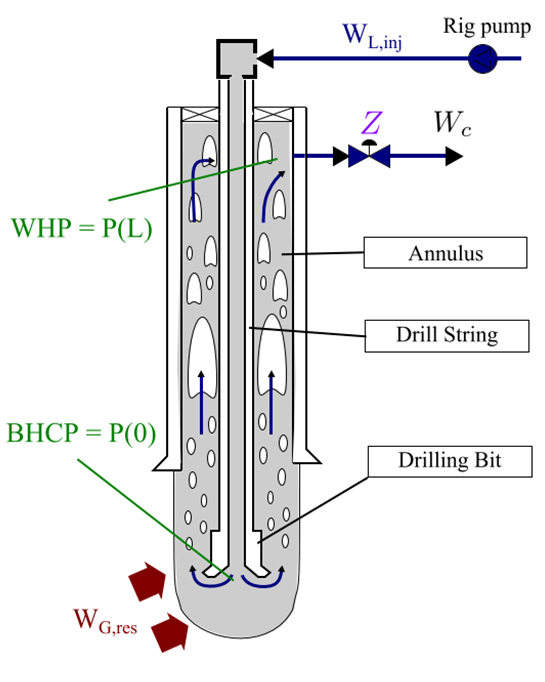
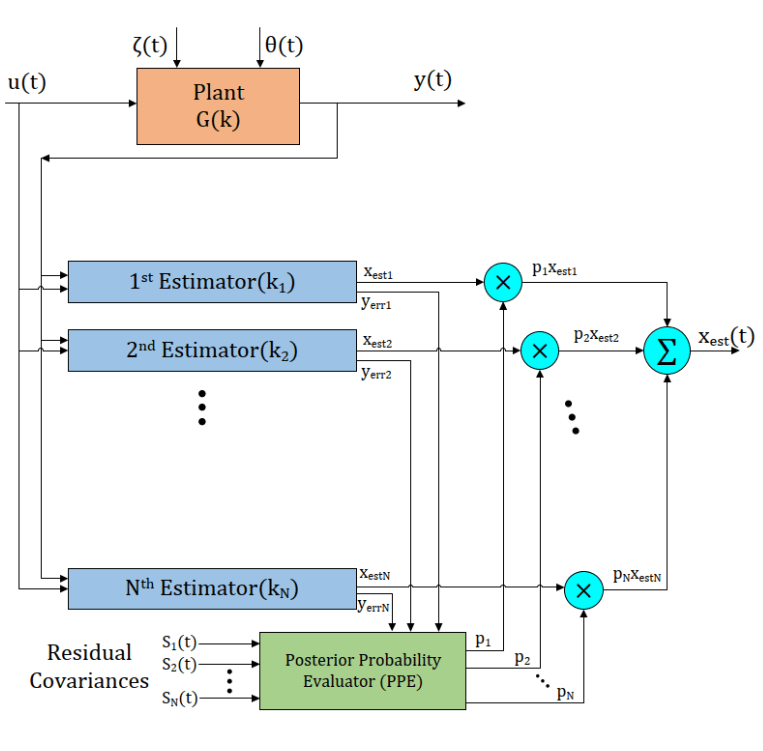
Managed Pressure Drilling System State Estimation Using The Multiple Model Adaptive Estimation Approach
A novel framework for the estimation of excavator’s actual productivity in the grading operation using Building Information Modeling (BIM)
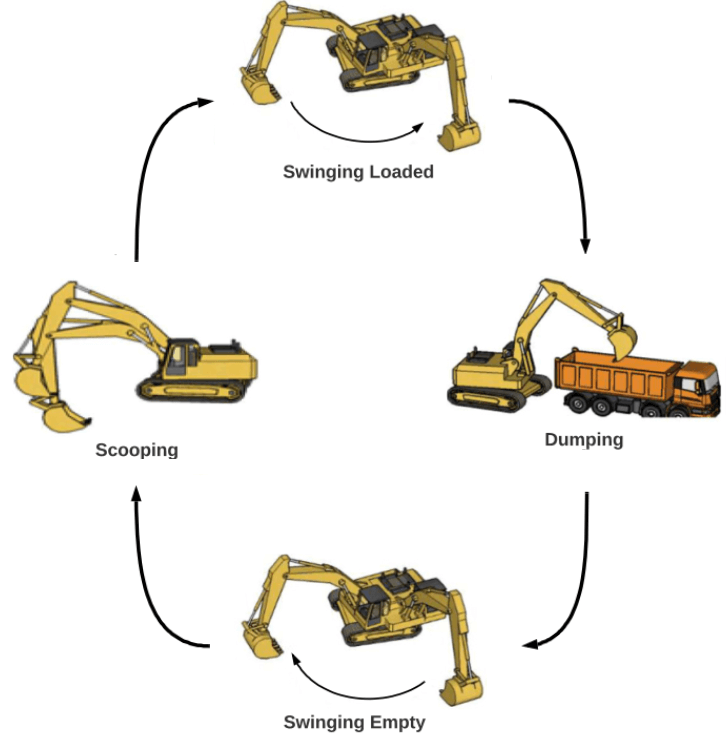
Automatic recognition of excavator working cycles using supervised learning and motion data obtained from inertial measurement units (IMUs)
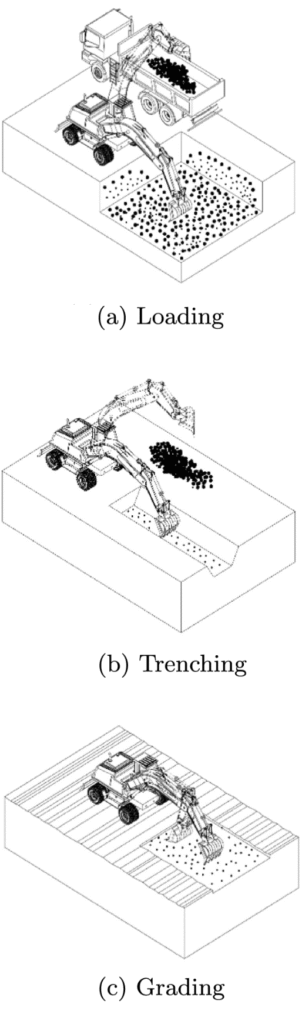
Automatic estimation of excavator actual and relative cycle times in loading operations