In real-world dynamic systems, from drilling processes to robotics and process control, operating safely and efficiently under constraints and disturbances is a core challenge. Traditional controllers like PID often struggle with nonlinear dynamics, large disturbances, and hard operational bounds. Nonlinear Model Predictive Control (NMPC) overcomes these limitations by using system models to predict future behavior and compute optimal control actions in real time.
This open-source project presents a MATLAB implementation of NMPC tailored for complex dynamic systems. It provides modular examples that demonstrate how predictive control can improve performance, respect constraints, and respond proactively to disturbances.
Why Predictive Control Matters
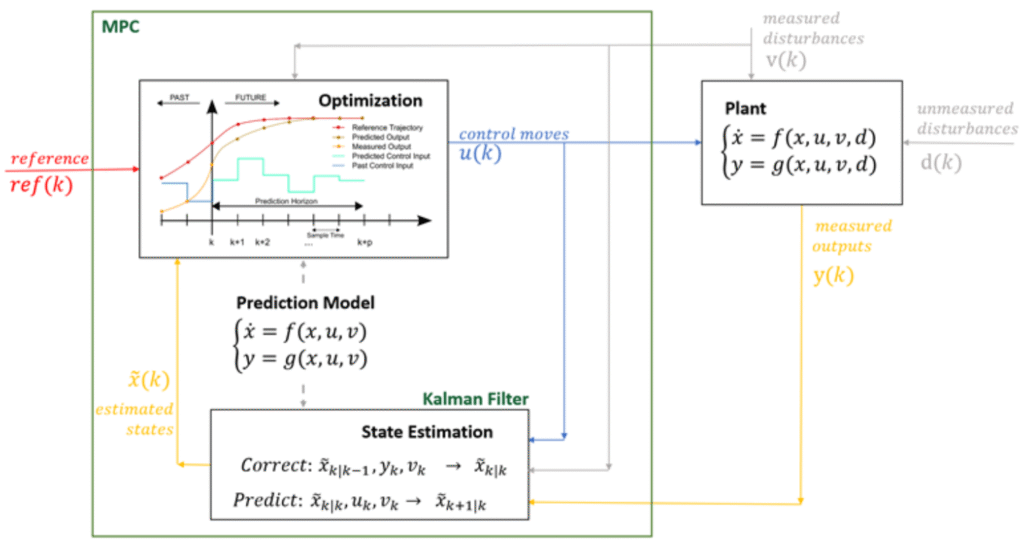
Model Predictive Control (MPC) uses a mathematical model of a system to forecast future states and optimize control inputs over a moving time horizon. Unlike classic reactive controllers, NMPC actively uses these predictions to anticipate changes and adjust actions before violations occur — making it especially useful for:
- Nonlinear and constrained systems
- Operations with safety and performance limits
- Systems subjected to fast dynamics and uncertainties
By solving an optimization problem at each time step, NMPC balances multiple objectives such as tracking performance, control effort, and constraint satisfaction.
Key Features
Nonlinear Dynamic Modeling
The controller uses a realistic nonlinear model to capture true system behavior instead of oversimplified linear approximations.
Predictive Optimization
At each sampling instant, the controller solves an optimization problem to determine the best control action while minimizing a cost function.
Constraint Handling
State and input limits are enforced directly within the optimization, ensuring safe operation.
Receding Horizon Strategy
Only the first optimal action is applied; predictions are updated as new measurements come in.
Customizable Modules
Users can adjust horizons, cost weights, constraints, and plant models for different applications.
Use Cases
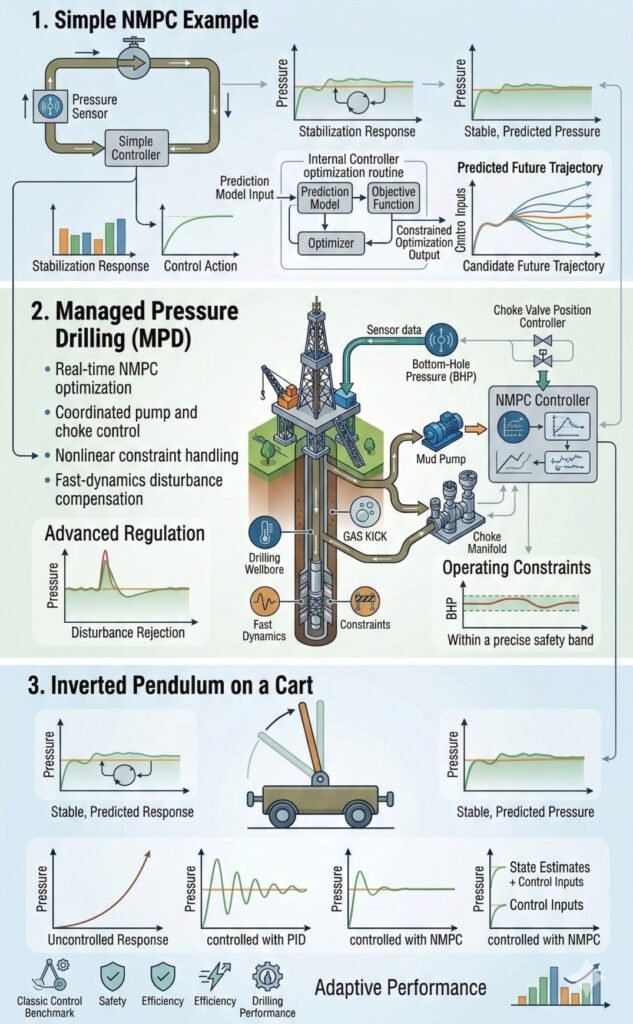
The repository contains multiple demonstration cases that illustrate NMPC in practice:
Simple NMPC Example
A minimal illustrative setup showing how NMPC operates from model definition to control action.
Managed Pressure Drilling (MPD)
An industrial application where NMPC regulates bottom-hole pressure (BHP) in drilling, combating fast dynamics, disturbances like gas kicks, and safety constraints.
Inverted Pendulum on a Cart
A classic control benchmark demonstrating stabilization of an unstable system using predictive control.
Each case includes:
- Model definitions
- NMPC setup scripts
- Simulations and plot outputs
- Configuration files
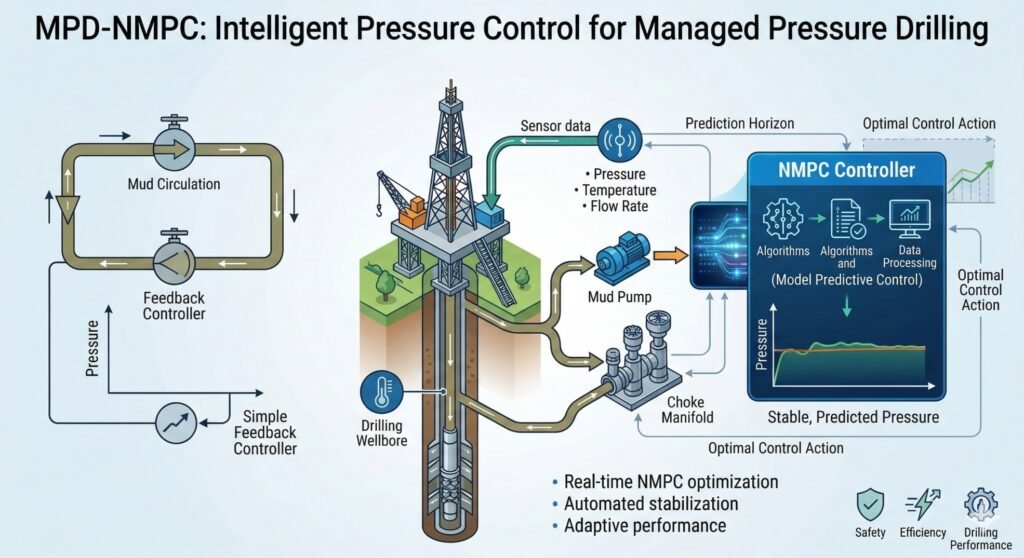
Managed Pressure Drilling (MPD)
In challenging drilling environments, maintaining downhole pressure within tight safety margins is one of the most critical aspects of drilling operations. Traditional controllers often struggle with fast dynamics, disturbances such as gas influx events, and stringent safety constraints. MPD-NMPC addresses these needs with a predictive control framework that anticipates future well behavior to regulate bottom-hole pressure (BHP) effectively and safely.
Managed Pressure Drilling (MPD) is an adaptive drilling technique designed to precisely control annular pressure profiles during drilling. This is essential when drilling through narrow pressure windows, complex formations, or deep reservoirs where conventional methods are insufficient. Effective pressure control reduces the risk of lost circulation, kicks, and other well control incidents that can lead to costly non-productive time or safety hazards.
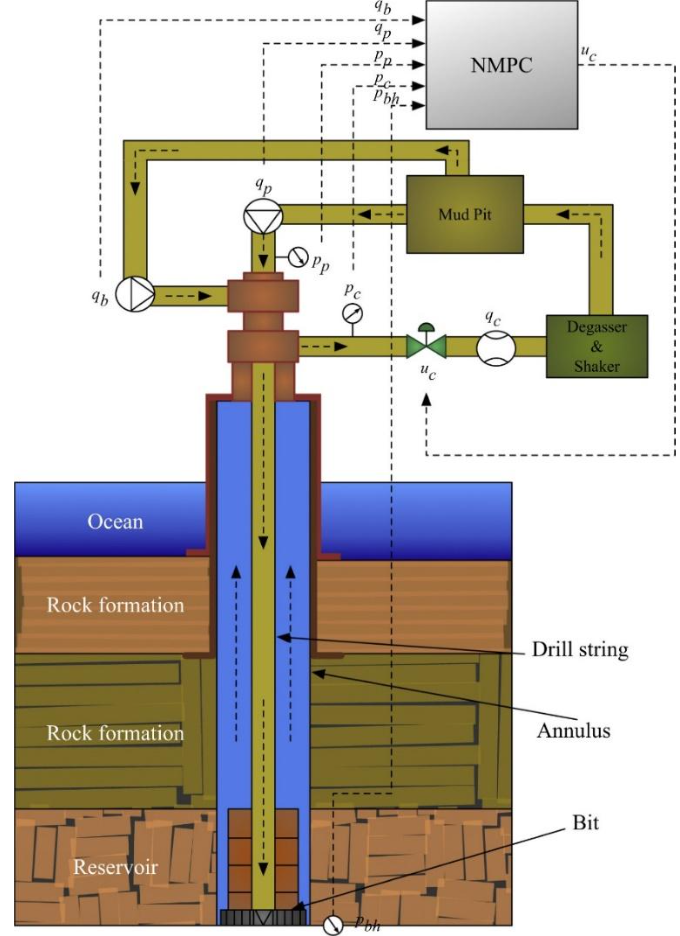
In MPD systems, a choke valve, along with mud pumps and other actuators, adjusts the backpressure on the wellbore. Optimal regulation of this choke opening, in coordination with pump flow, can significantly improve operational safety and efficiency, but requires a control strategy capable of anticipating system dynamics and managing constraints in real time.
This case demonstrates how NMPC:
- Predicts system response to pump rate changes
- Adjusts actuators proactively
- Handles disturbances like gas influx events
- Respects safety constraints on pressure and choke positions
Get Started — Open-Source Code
This entire NMPC project is open-source and available on GitHub. Clone the repo to explore examples, run simulations, and adapt control models to your own applications: